智能网联汽车,作为新一代信息技术与汽车产业深度融合的产物,正引领着全球汽车产业的深刻变革。其核心在于通过先进的通信技术,实现车辆与万物(V2X, Vehicle to Everything)的互联,并借助高度自动化的控制技术,最终达成安全、高效、舒适、节能的出行愿景。本文旨在探讨其关键技术与未来发展趋势。
一、 核心通信技术:构建车联万物之网
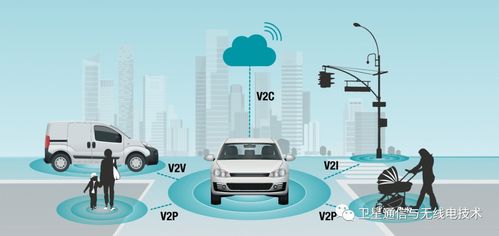
智能网联的实现,依赖于一套高效、可靠、低延时的通信网络,主要包括:
- 蜂窝车联网(C-V2X):以4G/5G/未来6G蜂窝网络为基础,是实现大范围、广覆盖通信的主力。5G凭借其超低时延(可低于1毫秒)、超高可靠性和大带宽特性,为远程驾驶、高精度地图实时更新、密集车队协同等场景提供了可能。
- 专用短程通信(DSRC):基于IEEE 802.11p标准,在短距离内实现车辆与车辆(V2V)、车辆与基础设施(V2I)间的直接、快速通信。虽然在产业化进程上曾面临挑战,但在特定场景(如交叉路口预警)中仍有其价值。
- 车载以太网与总线技术:随着汽车电子电气架构从分布式向域集中式、乃至中央计算式演进,高带宽、低延迟的车载以太网正逐步取代传统的CAN、LIN总线,成为车内各域控制器、传感器、执行器之间高速数据传输的“神经系统”。
二、 关键自动控制技术:赋予汽车“驾驶智能”
通信是感知与决策的信息通道,而自动控制则是决策的执行手段,两者紧密结合,构成闭环。
- 环境感知融合技术:通过毫米波雷达、激光雷达(LiDAR)、摄像头、超声波传感器等多源异构传感器的数据融合,构建车辆周围环境的精准、实时三维模型,为决策控制提供依据。
- 决策规划技术:基于感知信息、高精度地图与定位(结合GNSS、IMU和轮速计等),利用人工智能算法(特别是深度学习与强化学习),在复杂的动态交通环境中进行行为预测、路径规划和运动决策。
- 车辆纵向与横向协同控制:通过先进的底盘线控技术和多目标优化控制算法,精确控制车辆的加速、制动(纵向)和转向(横向),实现自适应巡航(ACC)、车道保持(LKA)、自动紧急制动(AEB)等功能,并向更高级别的协同式自适应巡航(CACC)和编队行驶发展。
三、 研究服务与产业协同
智能网联汽车的发展离不开跨学科、跨行业的深度研究服务与协同:
- 技术标准与法规研究:推动C-V2X、数据安全、功能安全(ISO 26262)、预期功能安全(SOTIF)等国际国内标准的制定与统一,以及相关道路测试、准入和权责法规的研究。
- 测试验证平台建设:构建包括仿真(软件在环、硬件在环)、封闭场地、实际道路在内的“三支柱”测试验证体系,特别是基于数字孪生技术的虚拟仿真测试,能极大加速开发进程并覆盖海量长尾场景。
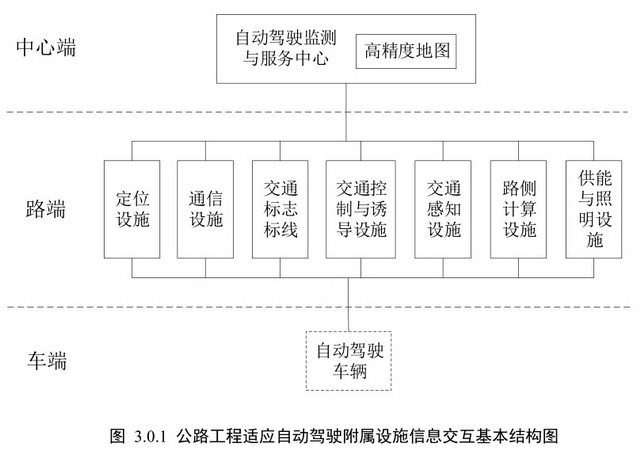
- 云控基础平台与数据服务:建设车路云一体化的云控基础平台,实现车辆运行状态、道路环境信息的汇聚、计算与分发,为智能驾驶、交通管理、出行服务提供数据支撑。
四、 未来发展趋势展望
1. “车路云”一体化深度融合:未来的发展将超越“单车智能”的局限,走向车端、路侧(智慧道路)、云端(边缘云/中心云)协同的体系化智能,通过全局信息共享与协同决策,解决单车感知局限,提升整体交通效率与安全冗余。
2. 通信与计算的边缘化:为满足极低时延要求,计算任务将更多下沉至路侧边缘计算单元(MEC)或车辆自身,实现本地化的快速感知、决策与控制。
3. 人工智能全面赋能:AI将更深层次地渗透到感知、预测、决策、控制的全链条,从依赖规则到数据驱动,实现更拟人化、更适应复杂场景的驾驶智能。
4. 数据安全与隐私保护成为基石:随着车辆网联化程度加深,网络安全、数据安全和个人隐私保护将成为技术开发和产品设计的核心前提,相关防护技术与法规将同步强化。
5. 应用场景商业化落地加速:技术将从测试示范逐步走向规模化商用,在特定场景如高速公路、物流园区、港口、矿区及城市RoboTaxi等领域率先实现商业闭环。
智能网联汽车是通信技术与自动控制技术交汇创新的典范。其未来发展必将是一个技术持续突破、标准法规不断完善、产业生态协同共建的长期过程,最终将重塑我们的出行方式与社会交通形态。